pid控制原理实例说明
编辑:首席新闻菌2022-10-24 12:10:00
PID三个字母是比例,积分,微分的英文首字母缩写。可见这三个功能在系统中都起作用,只是负责的功能不同。
别一看有微积分就吓的不行,认为比较难,其实不是的,下面我就用大白话给你说一下吧,了解原理就行了,我感觉没必要套用教课书上的模式,弄一大堆公式。我再给你画几张图,很容易就明白的。
一、比例调节P
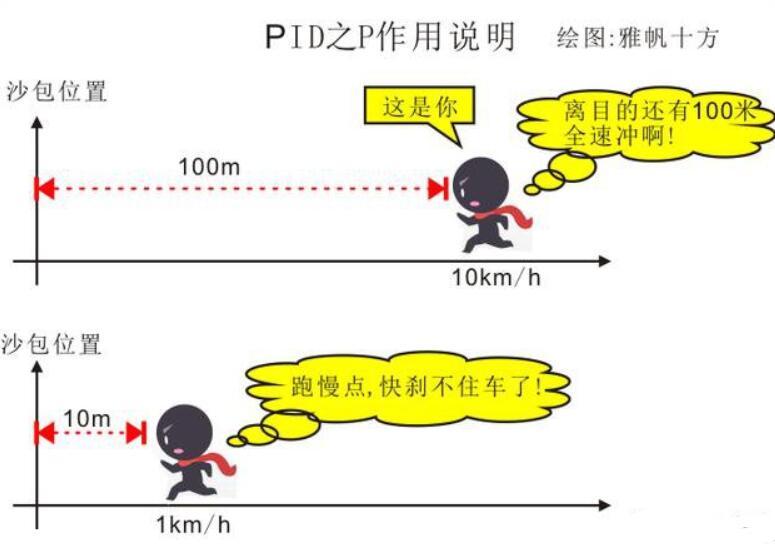
很实际一个例子,比如你跑向一个终点,当你离终点很远时会全速跑,快接近终点时你会降速,基本上到达终点了,你也停下来了。那么这个模型用图画出来就是这个样子的。
这里的100米,10米就是误差,误差越大,你跑的就越快,如果用数学建模的话,就是误差乘以一个系数,这个系数就是PID中的P(比例)。
这个图中的比例就是100,你看100m时,乘以100你就用10km/h去跑,10m时乘以100你就用1km/h去跑。
二、积分调节I
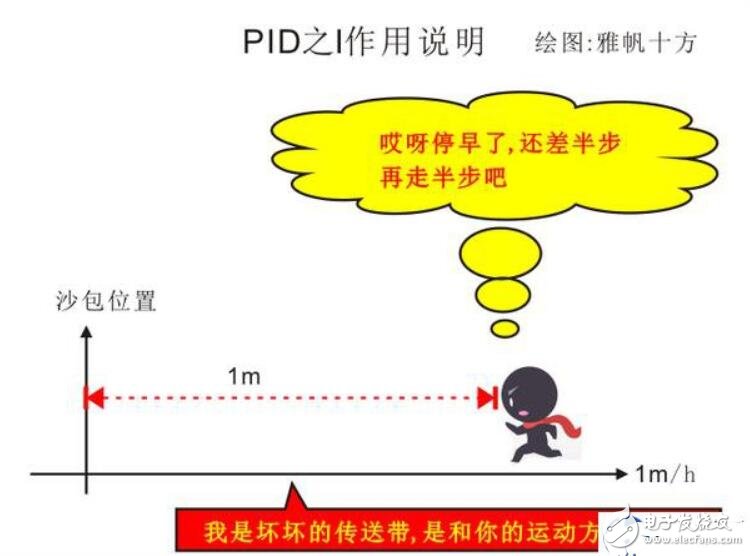
积分调节只有你在快接近目标时才起主要作用。比如说离目标还有1m时。积分是调节误差的,并且是随着时间是累计的(时间越大,这个误差表现的越明显,因为是误差乘以时间),这个时候就要考虑传送带的因素了。比如现在是1米,你不向前走一步去补偿就拿不到沙包,并且随着时间的流失,你是会向后移动的。误差会越来越大,1米,2米。
三、微分调节D
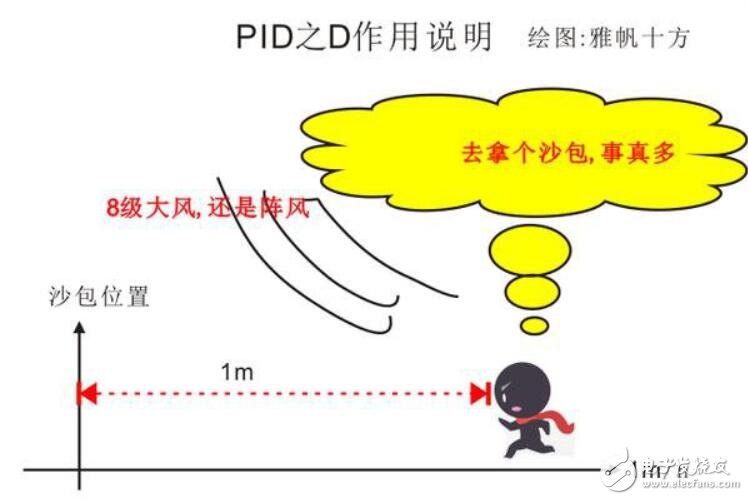
微分就是调节变化的快慢。比如说这时候有个8级大风,哎呀你老惨了。
注意我说的风是阵风,就是一阵有一阵没的那种,以体现变化量。8级大的风对你的速度肯定有影响的。
那么这个时候你就会自动根据风的大小调节速度。风大你就多使点劲,风小你就少使点劲。这个使劲的多少就是微分系数。
展开更多




